Fuzzy Path with Moving Sensors
Nov 10, 2014
Last month's blog demonstrated an algorithm that produced a "Fuzzy Path" that reduced detection without unnecessarily extending the distance to reach a destination. The user requirements were defined in the Fuzzy Algorithm using Membership Functions. These functions described the user's objectives to minimize detection and minimize route distance With some minor modification that algorithm was applied against a network with a moving sensor - the results are shown in the movie above.
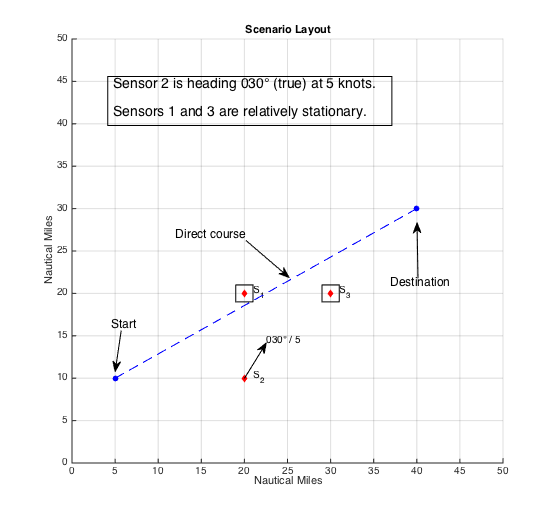
The diagram to the left shows the positions of the sensor network and the platform at the start of the scenario. The direct route to the destination passes through the center of the sensor network. The Angle of Arrival network is composed of three sensors with S2 moving at 5 knots on a course of 030° (true).
The Fuzzy Algorithm finds a course that meets the users requirements by evaluating the future positions of sensor S2 and its impact on the network's accuracy. The movie shows the progress of the platform and the sensor, along with the line-of-sight ranges for all the sensors. Note the algorithm finds a path just outside of S1's range.
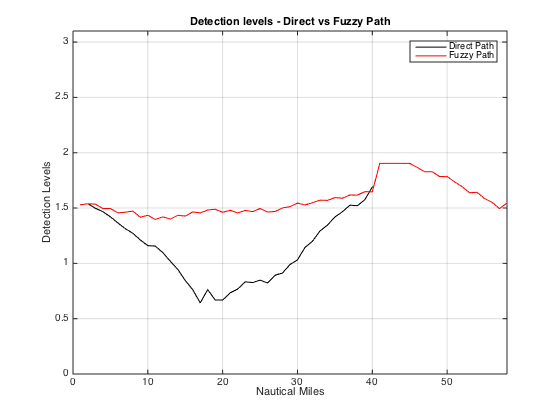
The figure to the right shows the detection levels of each of the two paths. The shorter, direct route, in blue shows a much worse detection level than the Fuzzy Path. The Fuzzy Path is approximately 14 nautical miles longer than the direct path.
The detection level shown in the figure is a logarithmic mapping from the actual computed areas in square nautical miles. The worst Fuzzy AOU is approximately 60 times larger than the worst direct path AOU.