Fuzzy Path Algorithm
Oct 9, 2014
If an operator has a reasonable estimate of an adversary sensor system's capability as shown in LOB Error Method and TDOA vs AOA Error Comparison how can he/she use this information to avoid detection and arrive at the planned destination? They have three choices: turn off the emitters that are susceptible to detection and tracking by the sensor network, set a course that travels beyond the sensor network's line-of-sight range or decide on a best course to reach his/her destination without being too detected and without diverting too far from the planned course.
Turning off the emitters and taking the planned course through the sensor network will significantly reduce the situation awareness provided by the emitters to the operator. If the emitter is a radar, the operator must rely on lookouts to detect and track platforms of interest. If the emitter is a data network, the operator loses the connectivity and the associated command and control and information exchanged with other units in the area. In this scenario, for a ship traveling at 15 knots, in an emitter-off state they would have reduced situational awareness for 2-hours during transit through the sensor field.
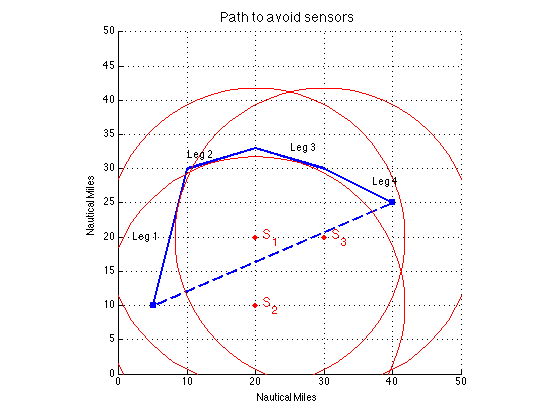
With emitters on, to avoid geolocation by this TDOA system, the ship needs to stay beyond line-of-sight of one of the three sensors. As shown in the figure on the right, Leg 1 is outside of S3 and the remaining legs are outside of S2's range. This track is approximately 57 nm, which is significantly further than the direct path of 38 nm. Maintaining the original speed, the ship would arrive more than an hour later than planned.
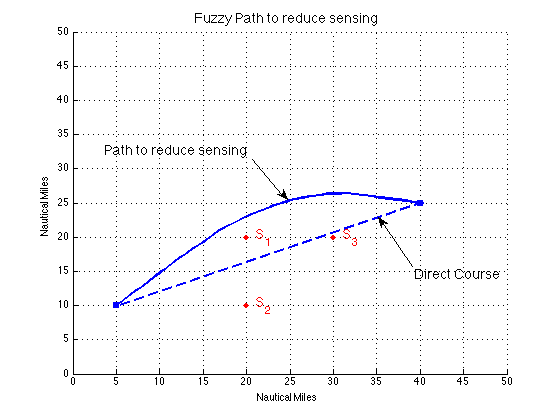
Besides distance, there are a number of reasons deviating too far off course may not be feasible. The diverted course might take the ship into a high-threat area, it might impact the defensive posture of the supported units or the sea state may be a factor. Given the decision that the most direct path is necessary, but one that reduces the geolocation accuracy of the sensor network to an acceptable level, how should the path be determined? Terms most direct and acceptable fit well within the paradigm of Fuzzy Logic, which allows the use of inexact terms to create membership functions that can be combined to produce discrete decision thresholds.
To perform this path planning, three membership functions were developed. One function addressed the level of sensor accuracy along a proposed path. The other two functions addressed the course deviation (in this case, a constraint caused by the sea state) and the total distance travelled. The values for each membership function were found for a set of paths from the current position to the destination. The process was repeated until the ship reached its destination. The algorithm used the max-min composition method [Ross] to choose the best course C:

Where
- A is the average sensor accuracy value
- D is the course deviation
- S is the deviation of distance to destination
A one-nautical mile step-size was used in the path calculation shown in the figure above. The path is seven miles (18%) longer and has a 20o offset from the direct path. The Fuzzy Path has an order-of-magnitude reduction in geolocation accuracy from the direct path.
References
Ross, T.J., Fuzzy Logic With Engineering Applications, John Wiley & Sons, Ltd, 3rd Ed., 2010.