Tracking Avoidance
Jan 23, 2015
In yesterday's blog we used a Kalman filter to improve the accuracy of an electromagnetic sensor network and to track a ship through simple maneuvers. We made the assumption that the ship makes periodic, discrete course changes and otherwise does not maneuver. We showed the filter's ability to track a ship as it made course changes to reach its destination.
Given a sensor network's capability to closely track a ship's emitters, how would an operator use this information to best avoid being tracked, while keeping an emitter on as long as possible? This emitter might be a radar that is necessary for navigation, threat detection or general situation awareness. The emitter could also be a communications system that is providing a critical information link between the operator's ship and other own-force units.
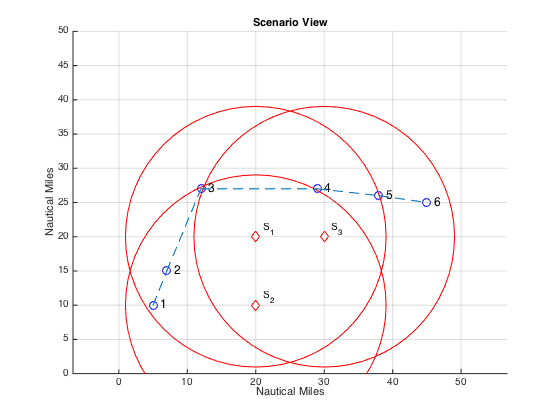
In the figure to the right, the ship's waypoints (or positions of intended movement - PIMs) are shown with the three sensor's line-of-sight (LOS) ranges. PIMs 3 through 5 are located at the edges of the LOS ranges. PIM's 1 and 2 are only in range of two sensors. From PIM 3 to PIM 4, the emitter can be located by all three sensors, providing the best localization. At PIM 4, the ship is beyond the range of S2 and at PIM 5 it is out of range of S1
To reduce detection, the ship has a few options. It can alter its route to stay outside the sensor networks range, it can reduce detection by following a Fuzzy Path described in an earlier blog, or it could shut down the emitter as it travels through the sensor network's most effective region.
The decision of when to turn off the emitter can provide tactical advantages. The adversary's system likely uses a tracking algorithm to project a target's motion if detection is temporarily lost, or if the update rate is low because of the number of emitters being tracked. Under either condition, in the short term, an emitter not being detected may go unnoticed. Picking the right point to shut down an emitter can increase the confusion in an adversary's situation awareness.
Given the assumption that the system is tracking the ship, the best time to shut down the emitter is at PIM 3. This position is in a region where only two sensors are in range of the emitter, and just prior to a significant course change to the east. In the animation above, we turned off the emitter and we increased speed to 15 knots to increase our distance from the Kalman estimate and our ship. For good measure, we kept the emitter off until PIM 5 where the ship is only in range of a single sensor, so it cannot be localized.